
Page 83 - 22-0722 EBOOK
P. 83
วารสารราชบััณฑิิตยสภา
ปีีที่่� ๔๖ ฉบัับัที่่� ๓ กัันยายน-ธัันวาคม ๒๕๖๔
ศาสตราจารย์์กิิตติคุุณ ดร.มงคุล เดชนคุรินทร์ 73
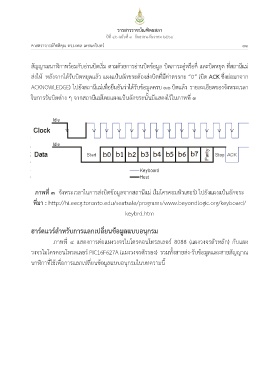
สัญญาณนี้าฬิิกาพิร้อมกับอ่านี้บิตัเริ�ม ตัามด้วยการอ่านี้บิตัข้้อมูล บิตัภาวะคู่หร่อค้� และบิตัหยุด ท้�สถูานี้้แม่
ส่งให้ หลังจากได้รับบิตัหยุดแล้ว แผงแป้นี้อักข้ระตั้องส่งบิตัท้�ม้ค่าตัรรกะ “0” (บิตั ACK ซ่�งย่อมาจาก
ACKNOWLEDGE) ไปยังสถูานี้้แม่เพิ่�อย่นี้ยันี้ว่าได้รับข้้อมูลครบ ๑๑ บิตัแล้ว รายละเอ้ยดข้องจังหวะเวลา
ในี้การรับบิตัตั่าง ๆ จากสถูานี้้แม่โดยแผงแป้นี้อักข้ระนี้ั�นี้ม้แสดงไว้ในี้ภาพิท้� ๓
ภาพท่� ๓ จังหวะเวลาในี้การส่งบิตัข้้อมูลจากสถูานี้้แม่ (ไมโครคอมพิิวเตัอร์) ไปยังแผงแป้นี้อักข้ระ
ท่�มูา : http://hi.eecg.toronto.edu/seatsale/programs/www.beyondlogic.org/keyboard/
keybrd.htm
ฮาร์ดแว่ร์สำาหรับการแลกเปล่�ยนข้้อมููลแบบอนุกรมู
ภาพิท้� ๔ แสดงการตั่อแผงวงจรไมโครคอนี้โทรลเลอร์ 8088 (แผงวงจรตััวหลัก) กับแผง
วงจรไมโครคอนี้โทรลเลอร์ PIC16F627A (แผงวงจรตััวรอง) รวมทั�งสายส่ง-รับข้้อมูลและสายสัญญาณ
นี้าฬิิกาท้�ใช้้เพิ่�อการแลกเปล้�ยนี้ข้้อมูลแบบอนีุ้กรมในี้บทความนี้้�