
Page 82 - 22-0722 EBOOK
P. 82
วารสารราชบััณฑิิตยสภา
ปีีที่่� ๔๖ ฉบัับัที่่� ๓ กัันยายน-ธัันวาคม ๒๕๖๔
72 การแลกเปล่�ยนข้้อมููลแบบอนุกรมูระหว่่างไมูโครคอนโทรลเลอร์โดยใช้้เกณฑ์์ว่ิธี่ข้องแผงแป้นอักข้ระ
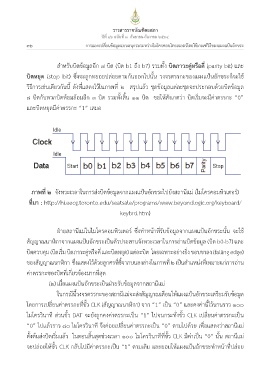
สำาหรับบิตัข้้อมูลอ้ก ๗ บิตั (บิตั b1 ถู่ง b7) รวมทั�ง บิตภาว่ะคู่หรือค่� (parity bit) และ
บิตหยุด (stop bit) ซ่�งจะถููกทยอยปล่อยตัามกันี้ออกไปนี้ั�นี้ วงจรตัรรกะข้องแผงแป้นี้อักข้ระก็จะใช้้
วิธี้การเช้่นี้เด้ยวกันี้นี้้� ดังท้�แสดงไว้ในี้ภาพิท้� ๒ สรุปแล้ว ชุ้ดข้้อมูลแตั่ละชุ้ดจะประกอบด้วยบิตัข้้อมูล
๘ บิตักับพิวกบิตัห้อมล้อมอ้ก ๓ บิตั รวมทั�งสิ�นี้ ๑๑ บิตั ข้อให้สังเกตัว่า บิตัเริ�มจะม้ค่าตัรรกะ “0”
และบิตัหยุดม้ค่าตัรรกะ “1” เสมอ
ภาพท่� ๒ จังหวะเวลาในี้การส่งบิตัข้้อมูลจากแผงแป้นี้อักข้ระไปยังสถูานี้้แม่ (ไมโครคอมพิิวเตัอร์)
ท่�มูา : http://hi.eecg.toronto.edu/seatsale/programs/www.beyondlogic.org/keyboard/
keybrd.htm)
ฝ่่ายสถูานี้้แม่ในี้ไมโครคอมพิิวเตัอร์ ซ่�งทำาหนี้้าท้�รับข้้อมูลจากแผงแป้นี้อักข้ระนี้ั�นี้ จะใช้้
สัญญาณนี้าฬิิกาจากแผงแป้นี้อักข้ระเป็นี้ตััวประสานี้จังหวะเวลาในี้การอ่านี้บิตัข้้อมูล (บิตั b0-b7) และ
บิตัควบคุม (บิตัเริ�ม บิตัภาวะคู่หร่อค้� และบิตัหยุด) แตั่ละบิตั โดยเฉพิาะอย่างยิ�ง ข้อบข้าลง (falling edge)
ข้องสัญญาณนี้าฬิิกา ซ่�งแสดงไว้ด้วยลูกศรท้�ช้้�จากบนี้ลงล่างในี้ภาพิท้� ๒ เป็นี้ตัำาแหนี้่งท้�เหมาะแก่การอ่านี้
ค่าตัรรกะข้องบิตัท้�เก้�ยวข้้องมากท้�สุด
(๒) เม่�อแผงแป้นี้อักข้ระเป็นี้ฝ่่ายรับข้้อมูลจากสถูานี้้แม่
ในี้กรณ้นี้้�วงจรตัรรกะข้องสถูานี้้แม่จะส่งสัญญาณเตั่อนี้ให้แผงแป้นี้อักข้ระเตัร้ยมรับข้้อมูล
โดยการเปล้�ยนี้ค่าตัรรกะท้�ข้ั�ว CLK (สัญญาณนี้าฬิิกา) จาก “1” เป็นี้ “0” และคงค่านี้้�ไว้นี้านี้ราว ๑๐๐
ไมโครวินี้าท้ ส่วนี้ข้ั�ว DAT จะยังถููกคงค่าตัรรกะเป็นี้ “1” ไปจนี้กระทั�งข้ั�ว CLK เปล้�ยนี้ค่าตัรรกะเป็นี้
“0” ไปแล้วราว ๘๐ ไมโครวินี้าท้ จ่งค่อยเปล้�ยนี้ค่าตัรรกะเป็นี้ “0” ตัามไปด้วย เพิ่�อแสดงว่าสถูานี้้แม่
ตัั�งตั้นี้ส่งบิตัเริ�มแล้ว ในี้ตัอนี้สิ�นี้สุดช้่วงเวลา ๑๐๐ ไมโครวินี้าท้ท้�ข้ั�ว CLK ม้ค่าเป็นี้ “0” นี้ั�นี้ สถูานี้้แม่
จะปล่อยให้ข้ั�ว CLK กลับไปม้ค่าตัรรกะเป็นี้ “1” ตัามเดิม และยอมให้แผงแป้นี้อักข้ระทำาหนี้้าท้�ปล่อย