
Page 15 - The Journal of the Royal Society of Thailand
P. 15
วารสารราชบััณฑิิตยสภา
ปีีท่� ๔๙ ฉบัับัท่� ๑ มกิราคุม-เมษาย์น ๒๕๖๗
ศาสตราจารย์์กิิตติคุุณ ดร.มงคุล เดชนคุรินทร์ 5
ข่่ายการส่ง-รับข่�อม้ลแบบอนุกรมในระบบ I2C
ระบบและเกณฑ์์วิธีีสำหรับการส่ง-รับขี�อม้ลแบบอนุกรมต่ามมาต่รฐาน I2C (I C หร่อ IIC ซึ่่�งย่อมาจาก
2
Inter-Integrated Circuit) ได�รับการพื่ัฒนาขี่�นโดยบริษััท Philips Semiconductors เม่�อ พื่.ศั. ๒๕๒๕
เพื่่�อเป็็นทางเล่อกใหม่ในการส่ง-รับขี�อม้ลแบบอนุกรมแทนการใช�เกณฑ์์วิธีีแบบ USART หร่อแบบ RS-232 ที�มี
ใช�มาก่อน โดยมีขี�อได�เป็รียบที�ต่ัวควบคุม (controller) หร่อไมโครคอนโทรลเลอร์ที�เป็็นแม่ขี่ายในระบบ I2C
สามารถเล่อกต่่อกับอุป็กรณ์รอบขี�าง (peripheral) หร่ออุป็กรณ์เป็้าหมาย (target) ที�เป็็นล้กขี่ายได�เป็็นจำนวน
มาก ผ่านชุดสายสัญญาณ ๒ เส�นชุดเดียวร่วมกัน ต่่างกับระบบ USART หร่อ RS-232 ซึ่่�งเน�นการส่ง-รับขี�อม้ล
ระหว่างอุป็กรณ์ที�ต่่ออย้่ที�ต่�นทางกับอุป็กรณ์ที�ต่่ออย้่ที�ป็ลายทางขีองชุดสายสัญญาณชุดเดียวกันเพื่ียง ๒ อุป็กรณ์
เท่านั�น ขี�อแต่กต่่างอีกขี�อหน่�งก็ค่อว่า ระบบ I2C เป็็นแบบสมวารหร่อป็ระสานเวลา (synchronous) ค่อ
ใช�สัญญาณนาฬิิกาเพื่่�อป็ระสานจังหวะเวลาในการเขีียน-อ่านขี�อม้ล ส่วนระบบ USART หร่อ RS-232 โดย
ส่วนใหญ่เป็็นแบบอสมวารหร่อไม่ป็ระสานเวลา (asynchronous) ค่อ ไม่ใช�สัญญาณนาฬิิกาในการป็ระสานจังหวะ
เวลา แต่่ใช�วิธีีต่กลงกันล่วงหน�าเกี�ยวกับอัต่ราการส่ง-รับบิต่ขี�อม้ลระหว่างค้่อุป็กรณ์ที�ต่�นทางกับอุป็กรณ์ที�ป็ลาย
ทาง (ผ้�ที�สนใจขี�อแต่กต่่างระหว่างระบบ I2C กับระบบ USART หร่อ RS-232 โป็รดด้หนังส่อเกี�ยวกับไมโคร
คอนโทรลเลอร์อย่างเช่น Schultz, 2008: 216-218, 273-283)
ระบบ I2C มีจุดป็ระสงค์หลักเพื่่�อแลกเป็ลี�ยนขี�อม้ลแบบอนุกรมระหว่างต่ัวควบคุมหร่อไมโคร
คอนโทรลเลอร์ (แม่ขี่าย) ที�ป็กต่ิทำงานด�วยอัต่ราเร็วส้ง กับอุป็กรณ์รอบขี�าง (ล้กขี่าย) ที�ทำงานด�วยอัต่ราเร็ว
ต่�ำกว่า โดยที�อัต่ราการส่ง-รับขี�อม้ลอาจส้งถ่ง ๑๐๐-๔๐๐ กิโลบิต่ต่่อวินาที และอุป็กรณ์ทั�งค้่อย้่ใกล�กัน เช่น
อย้่ในแผงวงจรแผงเดียวกัน (Robot Electronics, 2017)
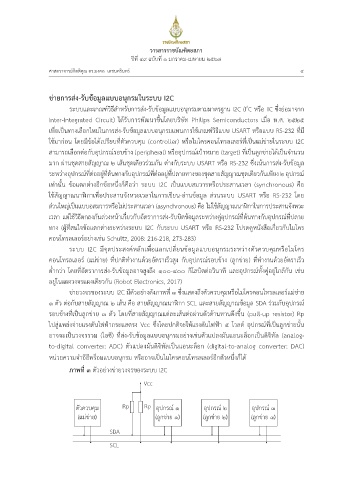
ขี่ายวงจรขีองระบบ I2C มีต่ัวอย่างดังภาพื่ที� ๓ ซึ่่�งแสดงถ่งต่ัวควบคุมหร่อไมโครคอนโทรลเลอร์แม่ขี่าย
๑ ต่ัว ต่่อกับสายสัญญาณ ๒ เส�น ค่อ สายสัญญาณนาฬิิกา SCL และสายสัญญาณขี�อม้ล SDA ร่วมกับอุป็กรณ์
รอบขี�างที�เป็็นล้กขี่าย ๓ ต่ัว โดยที�สายสัญญาณแต่่ละเส�นต่่อผ่านต่ัวต่�านทานด่งขี่�น (pull-up resistor) Rp
ไป็ส้่แหล่งจ่ายแรงดันไฟฟ้ากระแสต่รง Vcc ซึ่่�งโดยป็กต่ิจะให�แรงดันไฟฟ้า ๕ โวลต่์ อุป็กรณ์ที�เป็็นล้กขี่ายนั�น
อาจจะเป็็นวงจรรวม (ไอซึ่ี) ที�ส่ง-รับขี�อม้ลแบบอนุกรมอย่างเช่นต่ัวแป็ลงผันแอนะล็อกเป็็นดิจิทัล (analog-
to-digital converter: ADC) ต่ัวแป็ลงผันดิจิทัลเป็็นแอนะล็อก (digital-to-analog converter: DAC)
หน่วยความจำอีอีพื่ร็อมแบบอนุกรม หร่ออาจเป็็นไมโครคอนโทรลเลอร์อีกต่ัวหน่�งก็ได�
ภาพื่ที� ๓ ต่ัวอย่างขี่ายวงจรขีองระบบ I2C
Vcc
ต่ัวควบคุม Rp Rp อุป็กรณ์ ๑ อุป็กรณ์ ๒ อุป็กรณ์ ๓
(แม่ขี่าย) (ล้กขี่าย ๑) (ล้กขี่าย ๒) (ล้กขี่าย ๓)
SDA
SCL
