
Page 19 - The Journal of the Royal Society of Thailand
P. 19
วารสารราชบััณฑิิตยสภา
ปีีท่� ๔๙ ฉบัับัท่� ๑ มกิราคุม-เมษาย์น ๒๕๖๗
ศาสตราจารย์์กิิตติคุุณ ดร.มงคุล เดชนคุรินทร์ 9
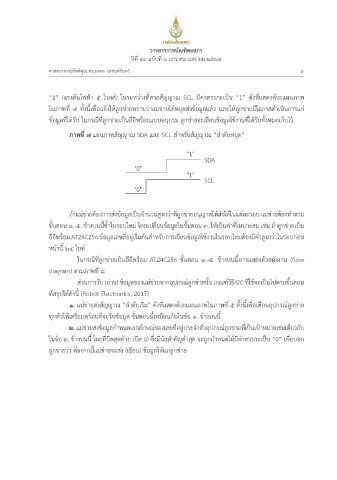
“1” (แรงดันไฟฟ้า ๕ โวลต่์) ในระหว่างที�สายสัญญาณ SCL มีค่าต่รรกะเป็็น “1” ดังที�แสดงด�วยแผนภาพื่
ในภาพื่ที� ๗ ทั�งนี�เพื่่�อแจ�งให�ล้กขี่ายทราบว่าแม่ขี่ายได�หยุดส่งขี�อม้ลแล�ว และให�ล้กขี่ายมีโอกาสดำเนินการแก่
ขี�อม้ลที�ได�รับ ในกรณีที�ล้กขี่ายเป็็นอีอีพื่ร็อมแบบอนุกรม ล้กขี่ายจะเขีียนขี�อม้ลใช�งานที�ได�รับทั�งหมดเก็บไว�
ภาพื่ที� ๗ แผนภาพื่สัญญาณ SDA และ SCL สำหรับสัญญาณ “ลำดับหยุด”
"1"
SDA
"0"
"1"
SCL
"0"
ถ�าแม่ขี่ายต่�องการส่งขี�อม้ลเป็็นจำนวนส้งกว่าที�ล้กขี่ายอนุญาต่ให�ส่งได�ในแต่่ละรอบ แม่ขี่ายต่�องทำต่าม
ขีั�นต่อน ๑.-๕. ขี�างบนนี�ซึ่�ำในรอบใหม่ โดยเป็ลี�ยนขี�อม้ลในขีั�นต่อน ๓. ให�เป็็นค่าที�เหมาะสม เช่น ถ�าล้กขี่ายเป็็น
อีอีพื่ร็อม AT24C256 ขี�อม้ลเลขีที�อย้่เริ�มต่�นสำหรับการเขีียนขี�อม้ลใช�งานในรอบใหม่ต่�องมีค่าส้งกว่าในรอบก่อน
หน�านี� ๖๔ ไบต่์
ในกรณีที�ล้กขี่ายเป็็นอีอีพื่ร็อม AT24C256 ขีั�นต่อน ๑.-๕. ขี�างบนนี�อาจแสดงด�วยผังงาน (flow
diagram) ต่ามภาพื่ที� ๘
ส่วนการรับ (อ่าน) ขี�อม้ลขีองแม่ขี่ายจากอุป็กรณ์ล้กขี่ายนั�น เกณฑ์์วิธีี I2C ที�ใช�จะเป็็นไป็ต่ามขีั�นต่อน
ที�สรุป็ได�ดังนี� (Robot Electronics, 2017)
๑. แม่ขี่ายส่งสัญญาณ “ลำดับเริ�ม” ดังที�แสดงด�วยแผนภาพื่ในภาพื่ที� ๕ ทั�งนี�เพื่่�อเต่่อนอุป็กรณ์ล้กขี่าย
ทุกต่ัวให�เต่รียมพื่ร�อมที�จะรับขี�อม้ล ขีั�นต่อนนี�เหม่อนกับในขี�อ ๑. ขี�างบนนี�
๒. แม่ขี่ายส่งขี�อม้ลกำหนดเอกลักษัณ์ขีองเลขีที�อย้่ป็ระจำต่ัวอุป็กรณ์ล้กขี่ายที�เป็็นเป็้าหมายเช่นเดียวกับ
ในขี�อ ๒. ขี�างบนนี� โดยที�บิต่สุดท�าย (บิต่ 0) ซึ่่�งมีนัยสำคัญต่�ำสุด จะถ้กกำหนดให�มีค่าต่รรกะเป็็น “0” เพื่่�อบอก
ล้กขี่ายว่า ต่่อจากนี�แม่ขี่ายจะส่ง (เขีียน) ขี�อม้ลให�แก่ล้กขี่าย