
Page 91 - 47-3
P. 91
วารสารราชบััณฑิิตยสภา
ปีีที่่� ๔๗ ฉบัับัที่่� ๓ กัันยายน–ธัันวาคม ๒๕๖๕
ศาสตราจารย์์กิิตติคุุณ ดร.มงคุล เดชนคุรินทร์ 83
PIC16F627A และใช้้สายสัญญาณท้�ตั่อกับข้า PC4 ข้องวงจรรวม 8255 (1) เพี่�อรับสัญญาณแสดง
สถูานี้การณ์ทำางานี้ข้องไมโครคอนี้โทรลเลอร์ PIC16F627A จากข้า 17 (RA0) ข้องไมโครคอนี้โทรลเลอร์
ดังกล่าว
ทางด้านี้แผงวงจรไมโครคอนี้โทรลเลอร์ PIC16F627A ในี้ภาพีท้� ๑ ซ้�งผู้นี้ิพีนี้ธี์กำาหนี้ดให้เป็นี้
แผงวงจรตััวรอง (slave) ในี้การแลกเปล้�ยนี้ข้้อมูลนี้ั�นี้ ใช้้ผล้กความถู้� ๔ เมกะเฮิรตัช้์ เป็นี้ตััวควบคุมความถู้�
ในี้การทำางานี้ โดยตั่อเข้้ากับข้า 15 (RA6) และข้า 16 (RA7) และใช้้ตััวเก็บประจุข้นี้าด ๒๒ พีิโคฟารัด
ตั่อไว้ระหว่างข้าแตั่ละข้าข้องตััวผล้กกับกราวนี้ด์ ในี้การจ่ายกำาลังไฟฟ้าให้แก่ไมโครคอนี้โทรลเลอร์
ตั่อข้า 5 (Vss) ลงกราวนี้ด์และป้อนี้แรงดันี้ไฟฟ้ากระแสตัรง ๕ โวลตั์ เข้้าท้�ข้า 14 (Vdd) ส่วนี้ข้า 4
(RST) ตั่อกับสัญญาณตัรรกะสูง (๕ โวลตั์) ผ่านี้ตััวตั้านี้ทานี้ข้นี้าด ๔.๗ กิโลโอห์ม เพี่�อให้ไมโครคอนี้โทรลเลอร์
ทำางานี้ได้ตัามปรกตัิ (ถู้าให้ข้านี้้�รับสัญญาณตัรรกะตัำ�า โดยการตั่อลงกราวนี้ด์ ไมโครคอนี้โทรลเลอร์
จะเข้้าสู่สถูานี้ะร้เซตัหร่อตัั�งใหม่) นี้อกจากนี้้� จะให้ไมโครคอนี้โทรลเลอร์ตััวนี้้�ส่งและรับข้้อมูลแบบข้นี้านี้
ข้นี้าด ๔ บิตั ผ่านี้ทางข้า 13-10 (PB7-PB4) ซ้�งสามารถูเข้้ยนี้โปรแกรมควบคุมให้เป็นี้ช้่องทางส่ง
ข้้อมูลออกหร่อเป็นี้ช้่องทางรับข้้อมูลเข้้าสลับกันี้ไปมาได้ ส่วนี้ข้า 17 (RA0) และข้า 18 (RA1) นี้ั�นี้ตั่อกับ
ข้า PC4 และข้า PC0 ข้องวงจรรวม 8255 (1) ในี้แผงวงจรไมโครคอนี้โทรลเลอร์ 8088 ตัามลำาดับ
เพี่�อแสดงและรับรู้สถูานี้การณ์ทำางานี้ข้องแตั่ละฝ่่ายดังท้�กล่าวแล้วในี้ย่อหนี้้าก่อนี้
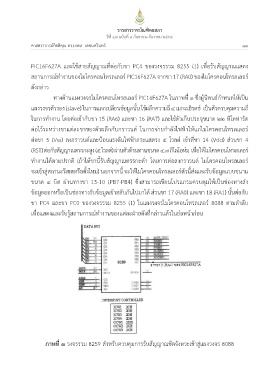
ภาพท่� ๓ วงจรรวม 8259 สำาหรับควบคุมการรับสัญญาณข้ัดจังหวะเข้้าสู่แผงวงจร 8088